 Adobe Community
Adobe Community
- Home
- After Effects
- Discussions
- Calculating auto tangent for 3 random points
- Calculating auto tangent for 3 random points

Copy link to clipboard
Copied


 2 Correct answers
2 Correct answers

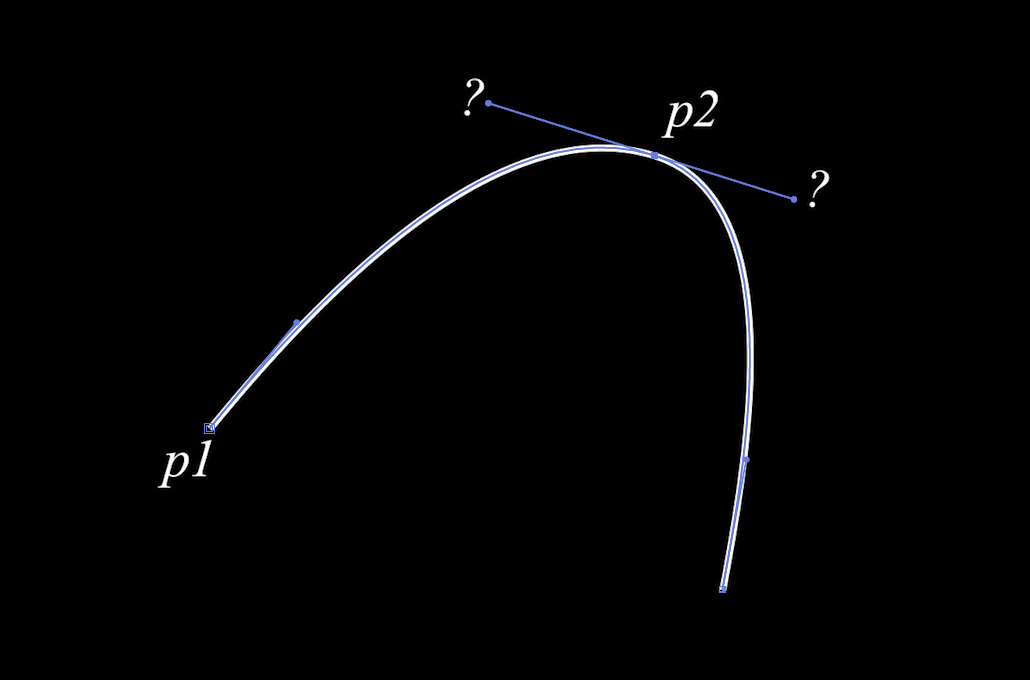
I think the formula for the auto bezier out tangent is (next point - previous point)/6 and the in tangent is the inverse of that. So building your 3-point path with an expression would look like this (although the tangents for the first and third points don't match what you have in your illustration):
p1 = [561,589];
p2 = [1105,256];
p3 = [1188,787];
p = [fromComp(p1),fromComp(p2),fromComp(p3)];
iT = [[0,0],(p1-p3)/6,(p2-p3)/6];
oT = [(p2-p1)/6,(p3-p1)/6,[0,0]];
createPath(p,iT,oT,false);
In Rotobazier, intangents and out tangets are parallel to the line formed between previous point and next point and lengths of those tangets are 1/3 (or close to ) of length between current point and previous point ( for in tangent) , 1/3 of length between current point and next point (for out tangent ).
Same is illustrated with expression below.
p1=fromComp(thisComp.layer("1").transform.position);
p2=fromComp(thisComp.layer("2").transform.position);
p3=fromComp(thisComp.layer("3").transform.posi
 4
Replies
4
4
Replies
4

Copy link to clipboard
Copied
Not a math specialist myself, but this might help?
http://www.motionscript.com/expressions-lab-ae65/bezier.html

Copy link to clipboard
Copied
What "auto-tangent"? There is no specific formula for that and the criteria for the tangents are completely arbitrary and up to whatever you deem suitable. Otherwise you simply can mimic a standard B-Spline behavior by hard-coding a few values in the Bèzier formula so it effectively is only a bicubic spline like zeroing out the third component.
Mylenium
Copy link to clipboard
Copied
I think the formula for the auto bezier out tangent is (next point - previous point)/6 and the in tangent is the inverse of that. So building your 3-point path with an expression would look like this (although the tangents for the first and third points don't match what you have in your illustration):
p1 = [561,589];
p2 = [1105,256];
p3 = [1188,787];
p = [fromComp(p1),fromComp(p2),fromComp(p3)];
iT = [[0,0],(p1-p3)/6,(p2-p3)/6];
oT = [(p2-p1)/6,(p3-p1)/6,[0,0]];
createPath(p,iT,oT,false);Copy link to clipboard
Copied
In Rotobazier, intangents and out tangets are parallel to the line formed between previous point and next point and lengths of those tangets are 1/3 (or close to ) of length between current point and previous point ( for in tangent) , 1/3 of length between current point and next point (for out tangent ).
Same is illustrated with expression below.
p1=fromComp(thisComp.layer("1").transform.position);
p2=fromComp(thisComp.layer("2").transform.position);
p3=fromComp(thisComp.layer("3").transform.position);
// 3 Nulls to follow for position;
intan2=((p1-p3)/length(p1,p3)) * ( length(p2,p1)/3);
outtan2=((p3-p1)/length(p1,p3)) * ( length(p2,p3)/3);
// number 3 at denometer can be varied to adjust curve (>2 is better)
//((p1-p3)/length(p1,p3)) gives a tangent of unit length in required intan direction.
//((p3-p1)/length(p1,p3)) gives a tangent of unit length in required outtan direction.
pts=[p1,p2,p3];
intan=[[0,0],intan2,[0,0]];
outtan=[[0,0],outtan2,[0,0]];
createPath(points = pts, inTangents = intan, outTangents = outtan, isClosed = false)

 AdChoices
AdChoices
{kind=link}
{kind=link}