
Answered
JavaScript – How to check if a shape is inside another curved shape?
Hi
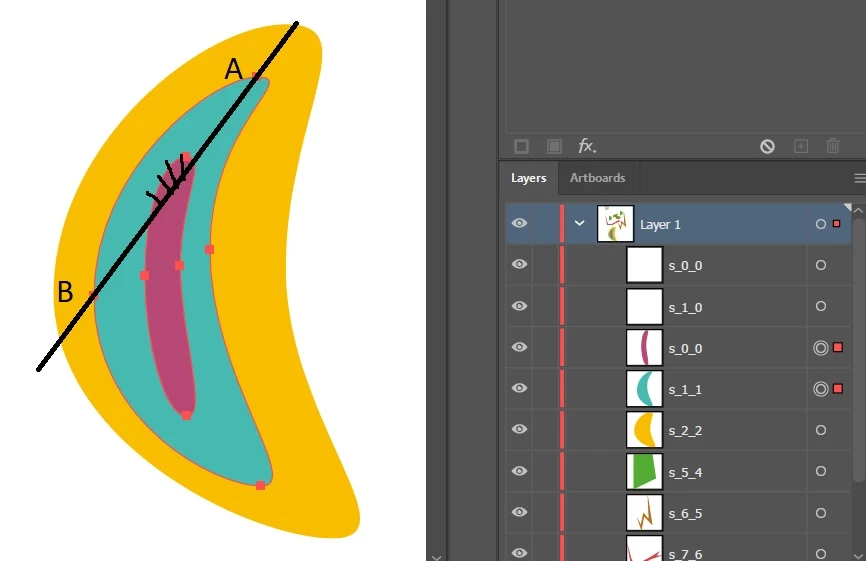
I’ve a Illustrator design with curved and nested shapes. I’ve created JavaScript for Illustrator to identify if a shape (foreach) is lying inside another shape, it is based on the algo posted by 56ka in post java - Algorithm to verify if a shape is inside another - javafx - Stack Overflow but I realized that it doesn’t work for curved shapes ☹ because this algo assumes straight lines between anchor points, see picture below where algo fails for checking s_0_0 inside s_1_1:
I wonder if somebody has overcome this type of problem for Illustrator JavaScript for design with curved and nested shapes if yes can share the used algo?
Thank you in advance for your help!
